We qualified to go to state, and have begun to develop solutions to the areas we felt needed improvement at regional. Will keep this updated as we progress.
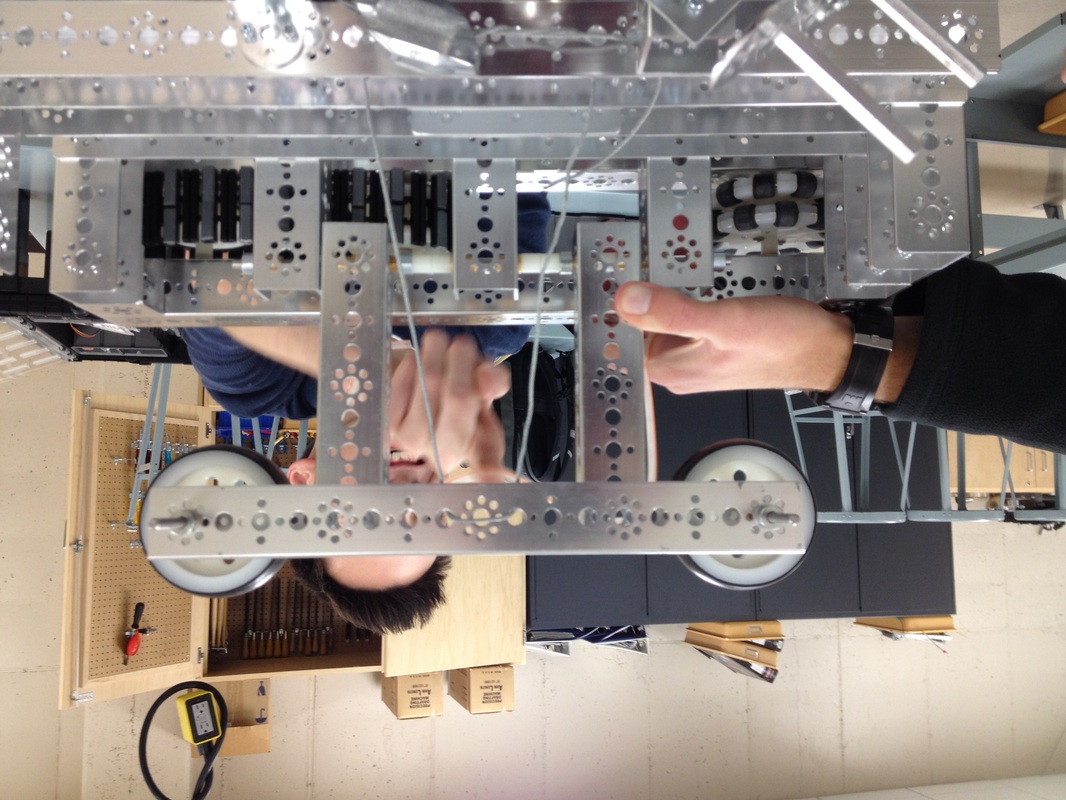
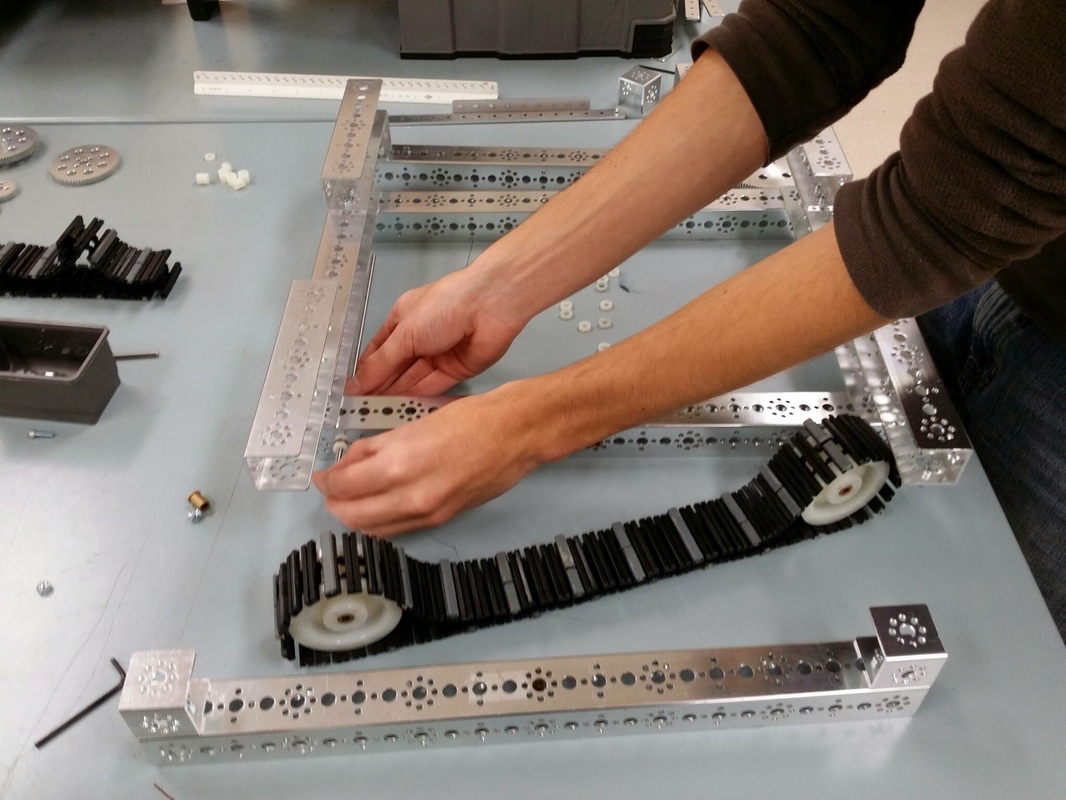
With this design we combine the traction of treads needed to get up the ramp with the traverse ability of omni-wheels. We need further testing, but this will most likely be our final drive train.
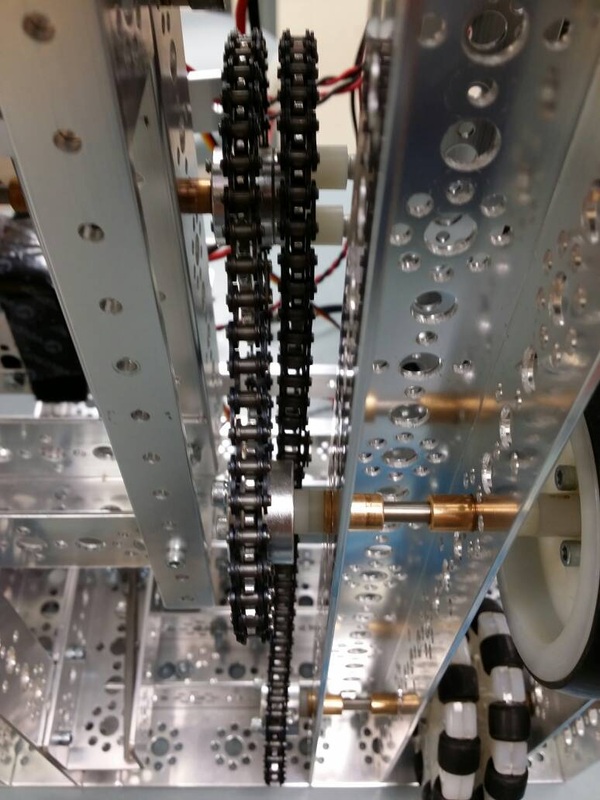
This is a drive train prototype that involves a center grippy-wheel flanked on each side by omni-wheels. All wheels would be powered by chain drive to allow redundancy. With the addition of the grippy-wheel, the robot would gain more traction without sacrificing traverse speed. Unfortunately this design failed because the omni and grippy wheels are different sizes and the inside of our frame lacks sufficient space to chain three separate wheels on one side.
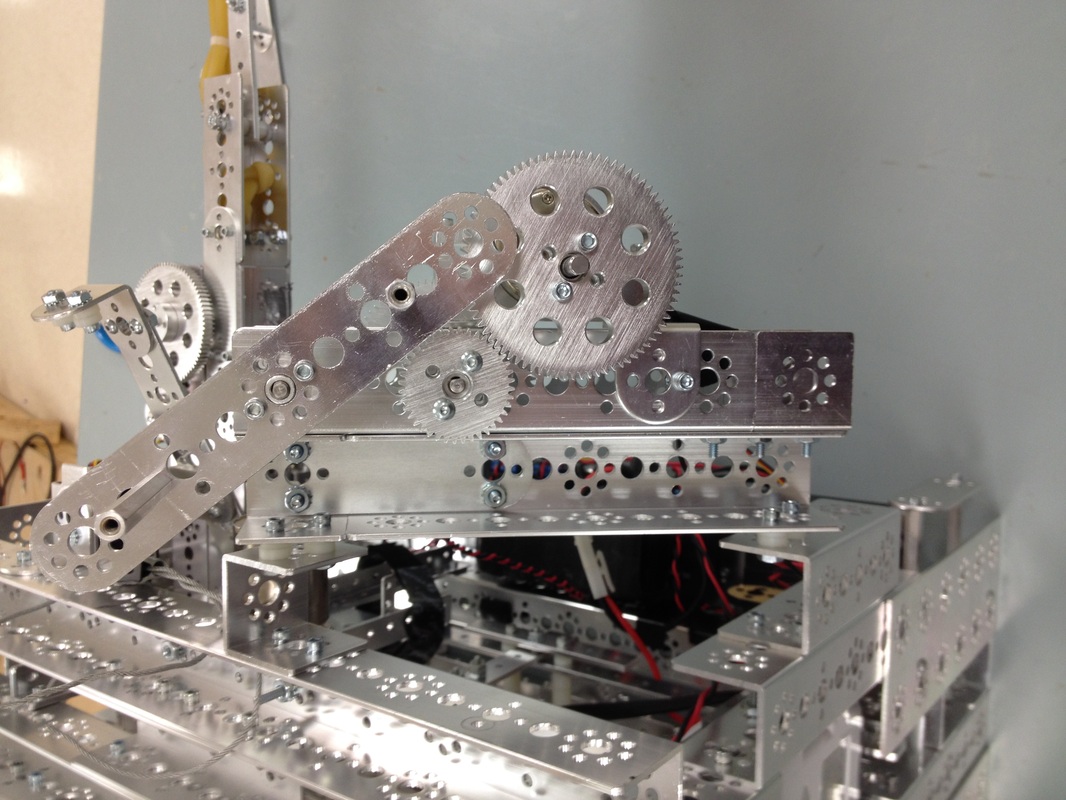
This geared spindle raises the flag. The drop-down rollers on the side of the robot allow our bot to drive along the wall to align with the corner flag. When in position, the 4:1 gear ratio on the spindle system will swiftly raise the flag.
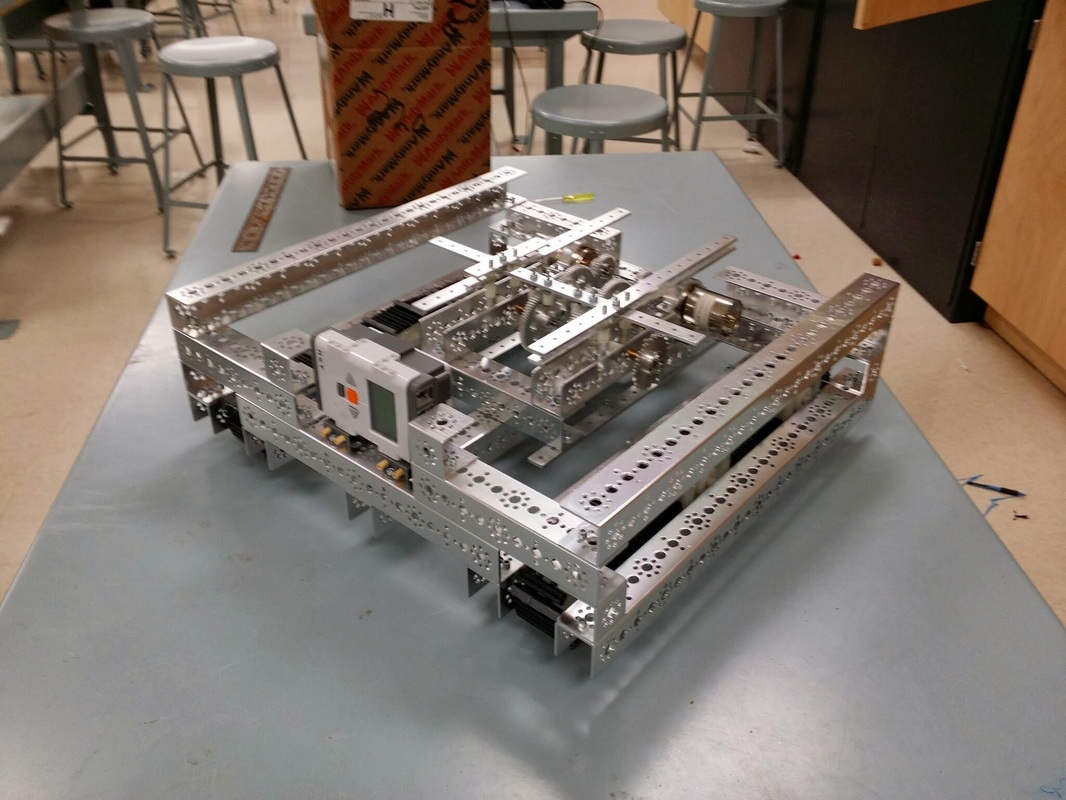
Current state of the robot, with the climbing mechanism and electronics mounted 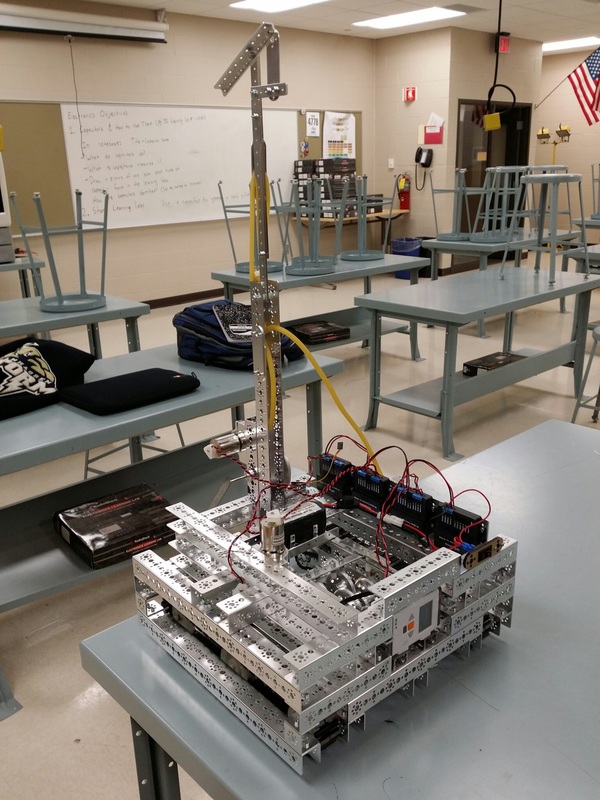 Electronics and climbing mechanism mounted This is the functional prototype of our climbing mechanism. The arm will start in the robot folded up. During End Game, the rack and pinion will extend the first stage of the arm. When the arm extends a certain distance, the flip-up arm becomes unclasped and the surgical tubing causes the second stage of the arm to swing upward. Once the hook latches onto the bar, the rack and pinion will run backwards to lift the robot. This prototype, with the exception of the hook, could be used in the final robot.
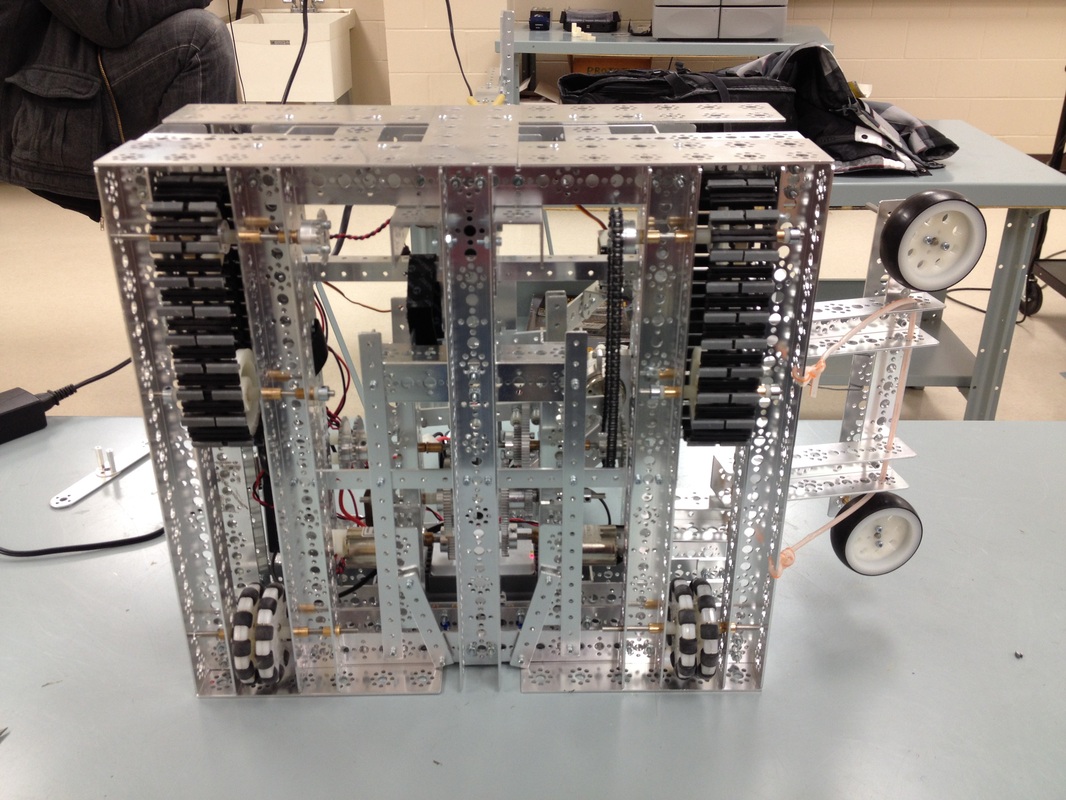
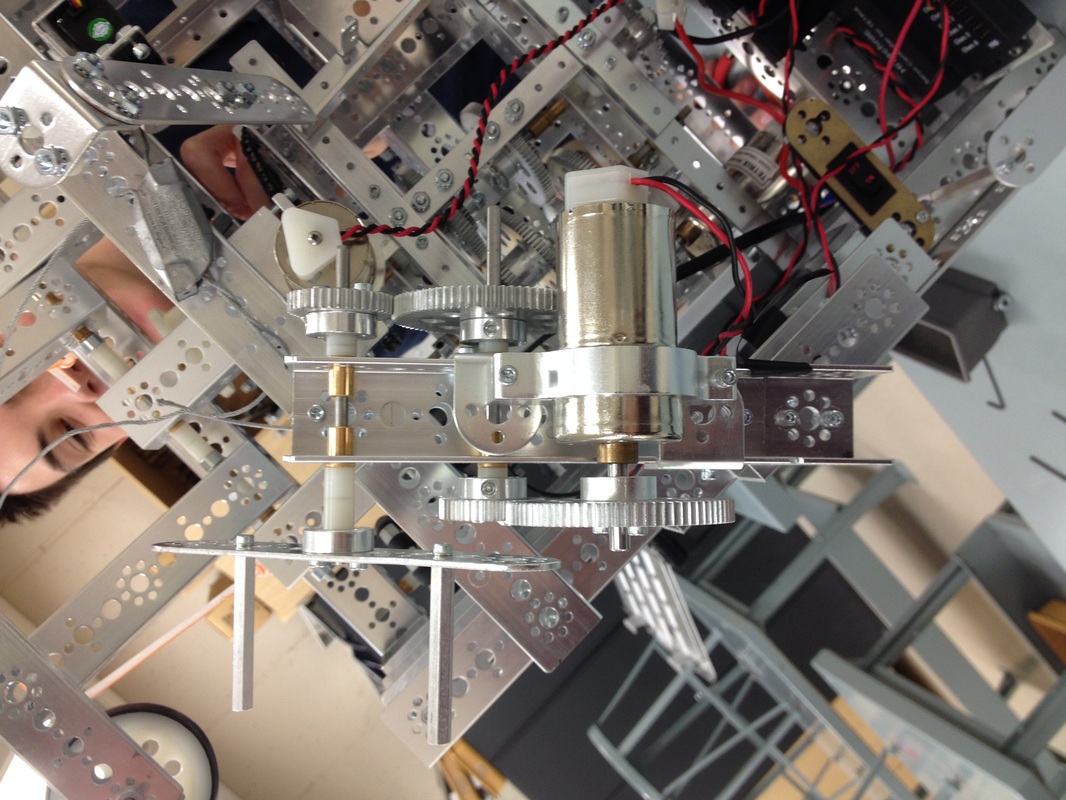
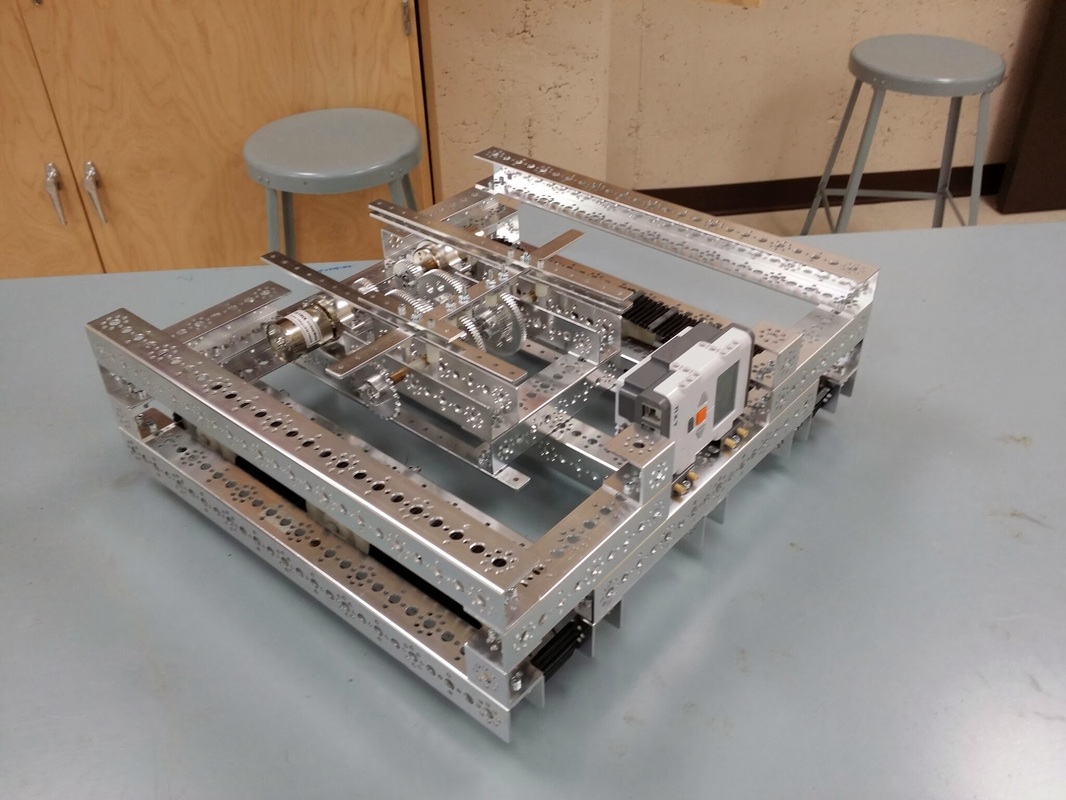
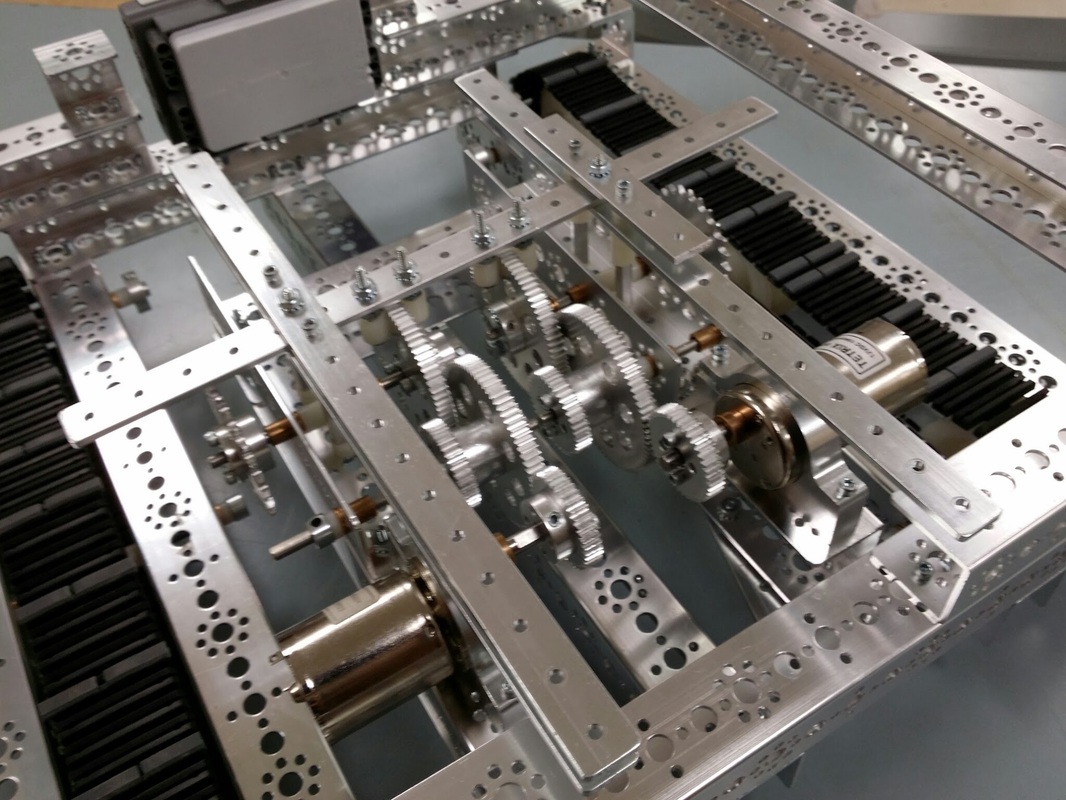
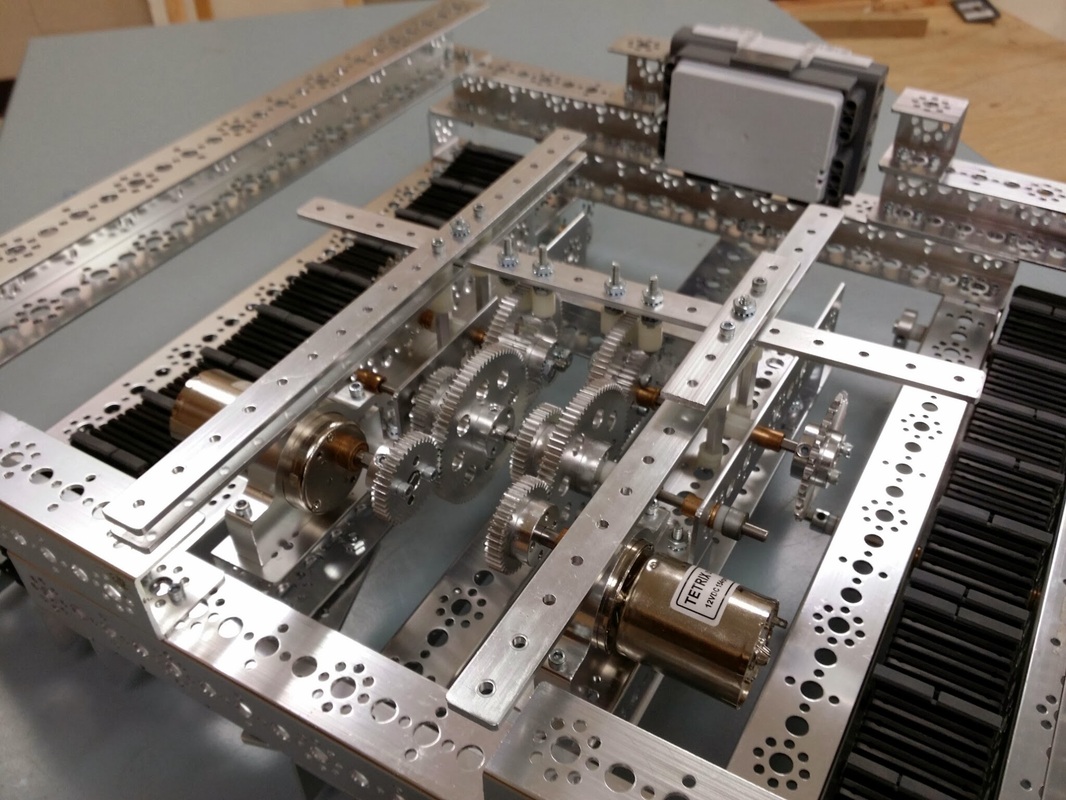
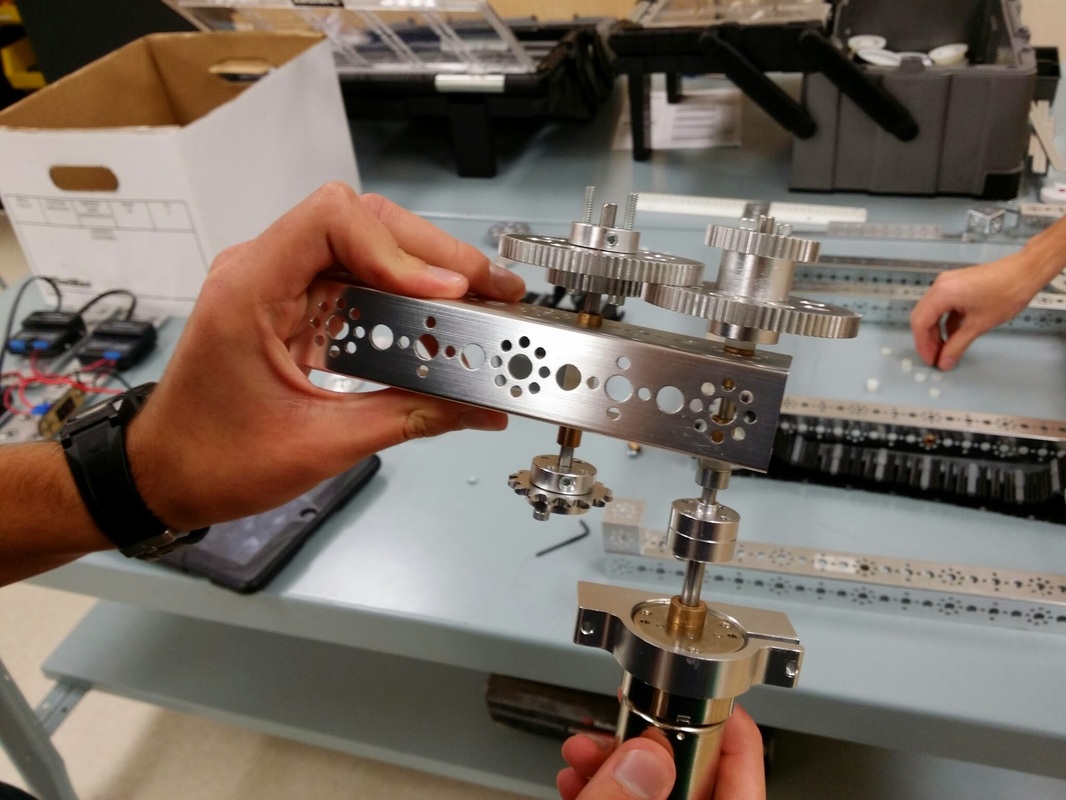
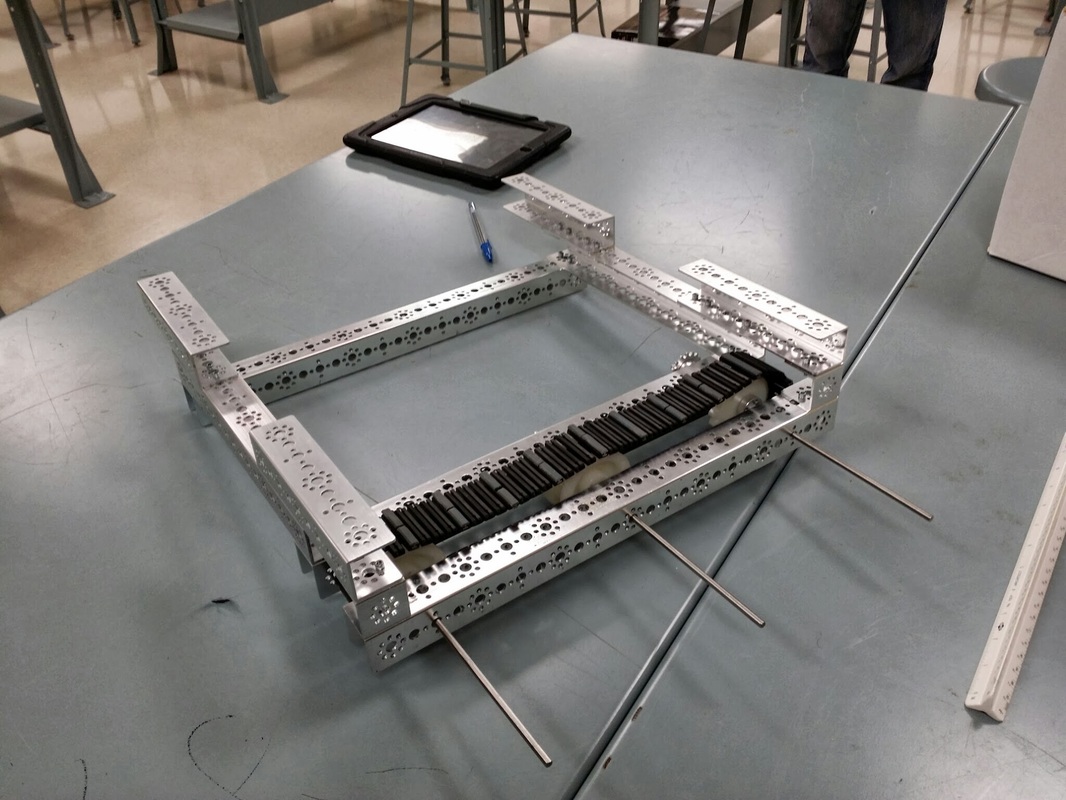
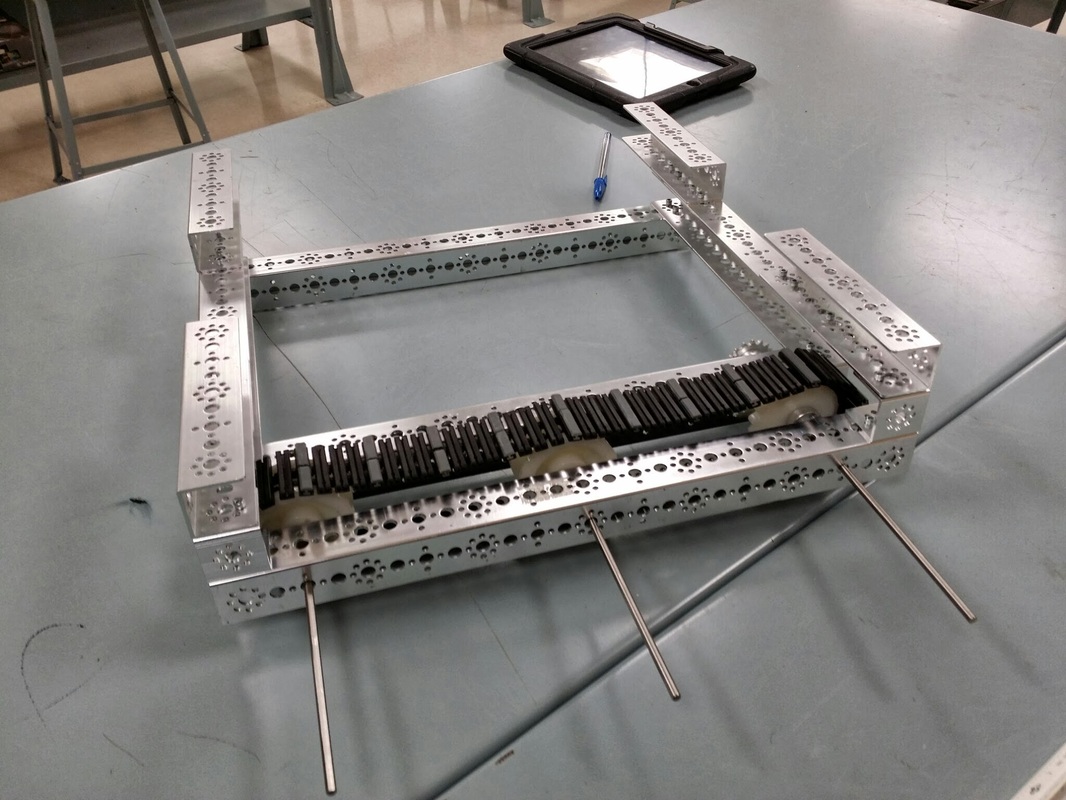
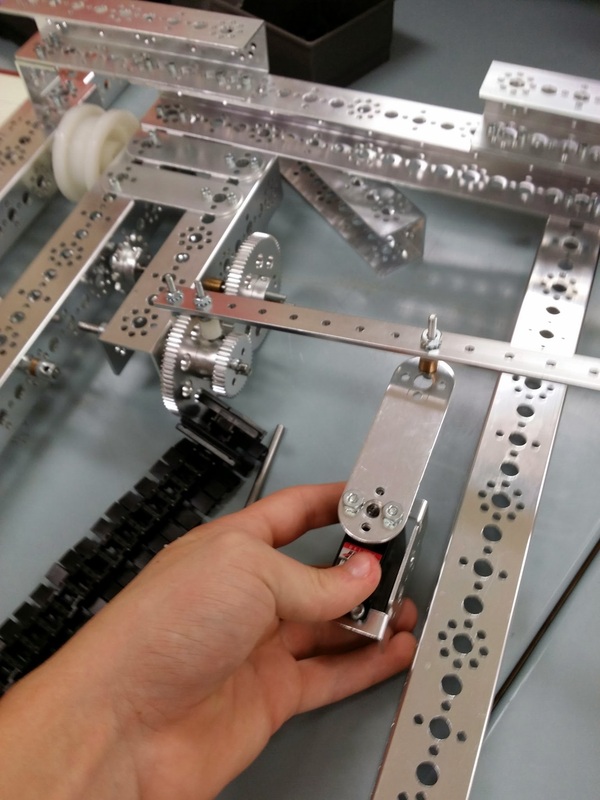
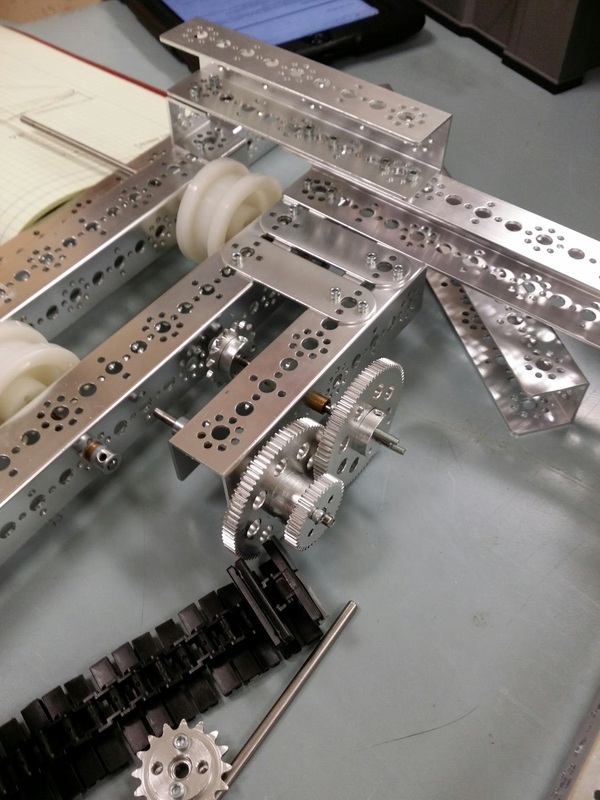
We finished mounting out transmission onto our treaded drive base. The frame is wide enough to allow the entire gear assembly to fit in the center. A single servo motor is the mechanism that changes the gears. Chains will connect the geared shafts to the drive wheels. Currently we are having technical difficulties with our servo and we have yet to connect the chains. Below a few of our initial prototypes are shown. We have the initial design of our frame (a wide, low base with treads), as well as a prototype transmission. | About This BlogWeekly updates on our capstone FTC project ArchivesJanuary 2014 Categories |

 RSS Feed
RSS Feed