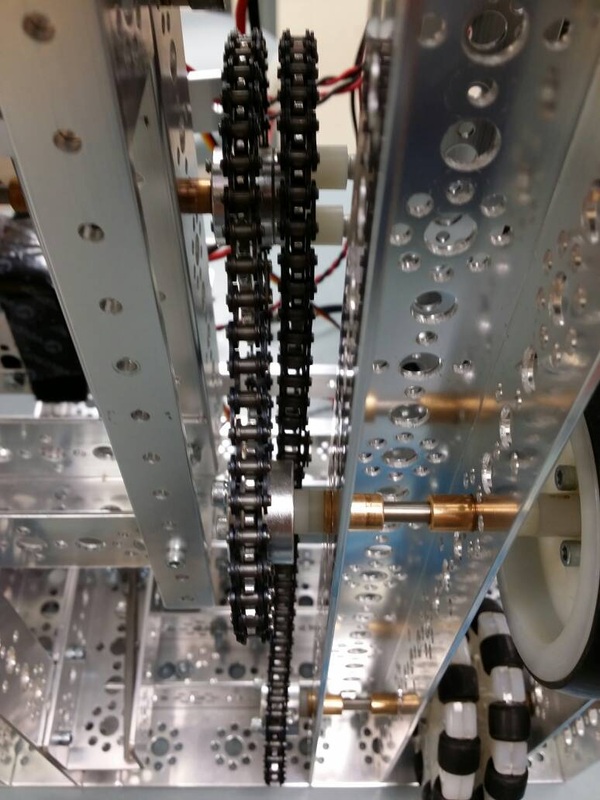

This is a drive train prototype that involves a center grippy-wheel flanked on each side by omni-wheels. All wheels would be powered by chain drive to allow redundancy. With the addition of the grippy-wheel, the robot would gain more traction without sacrificing traverse speed. Unfortunately this design failed because the omni and grippy wheels are different sizes and the inside of our frame lacks sufficient space to chain three separate wheels on one side.
About This BlogWeekly updates on our capstone FTC project ArchivesJanuary 2014 Categories |
 RSS Feed
RSS Feed